Instalación y conexión inicial
Instalación de Python en tu ordenador
-
- Para crear tu código necesitas un editor de texto. Te recomendamos utilizar Visual Studio Code, que puede descargarse aquí, aunque cualquier IDE compatible con Python es válido.
- Instala Python 3. Puedes descargarlo aquí. Asegúrate de instalarlo con la opción «Añadir Python al PATH» marcada como se muestra en la imagen inferior.

Instalación de la librería robobopy
Antes de comenzar la descripción de los métodos de Python que nos permitirán programar a Robobo, es necesario instalar la librería correctamente, y tener claros algunos conceptos clave para realizar los programas con éxito.
Para poder ejecutar código en el robot, es necesario instalar la librería robobopy. Para ello utilizaremos el gestor de paquetes de Python pip (package instaler for Python).
A continuación, se explican los pasos para instalar esta librería con pip.
-
-
- Una vez que hayas instalado Python 3, abre una ventana de terminal. Por ejemplo, en Visual Studio Code, elige “Ver” en el menú superior y selecciona “Terminal”
- Escribe el siguiente comando para instalar la biblioteca robobopy:
-
pip install robobopy
NOTA: para la versión de MacOS podría ser necesario utilizar el comando pip3
Conexión inicial
Todos los programas que se desarrollen en Python para programar al robot Robobo tienen una primera parte inicial común: importar la librería robobopy y realizar la conexión con el robot (real o simulado).
Siempre será necesario incluir al menos las siguientes líneas:
1. Se importa la clase Robobo de la librería robobopy.
from robobopy.Robobo import Robobo
2. Se crea un objeto de la clase Robobo, indicando la dirección IP de Robobo.
2.1 En el caso del robot físico, se pone la IP asignada al smartphone, que puedes ver en la App Robobo. Por ejemplo, si la IP es 10.113.26.130 se incluye la siguiente línea.
rob = Robobo("10.113.26.150")
2.2 En el caso del RoboboSim, lo habitual es tenerlo instalado en el mismo ordenador en el que se realizan los programas, con lo que la dirección será “localhost”.
rob = Robobo("localhost")
3. Se establece la conexión con el robot, a través del método “connect”:
rob.connect()
Más detalles sobre la configuración del robot Robobo en Python están desarrollados en este enlace.
Comprobación: conexión de robobopy y RoboboSim
Una vez instalada la aplicación, podemos comprobar su correcto funcionamiento en RoboboSim mediante la ejecución de un programa de ejemplo:
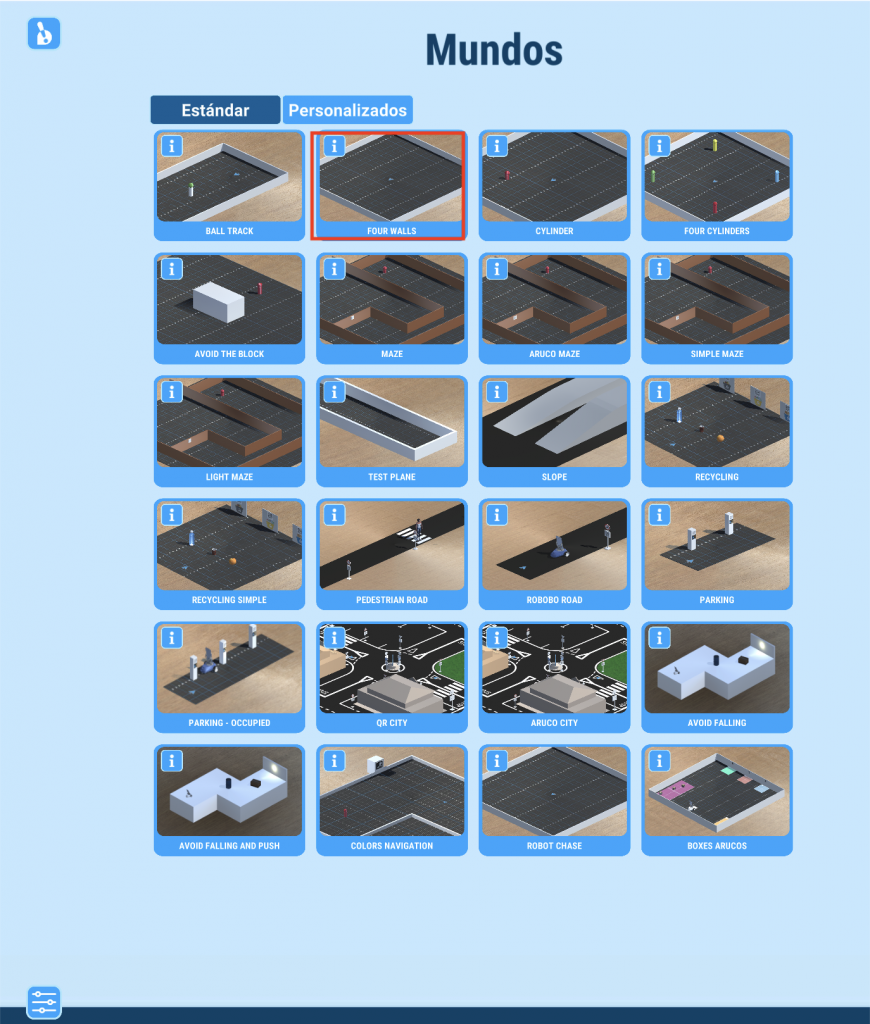
1. Ejecutar el RoboboSim, y en la pantalla inicial, acceder a la selección de mundos a través del botón “Mundos”.

2. Elegir un mundo; por ejemplo, “Four Walls”.
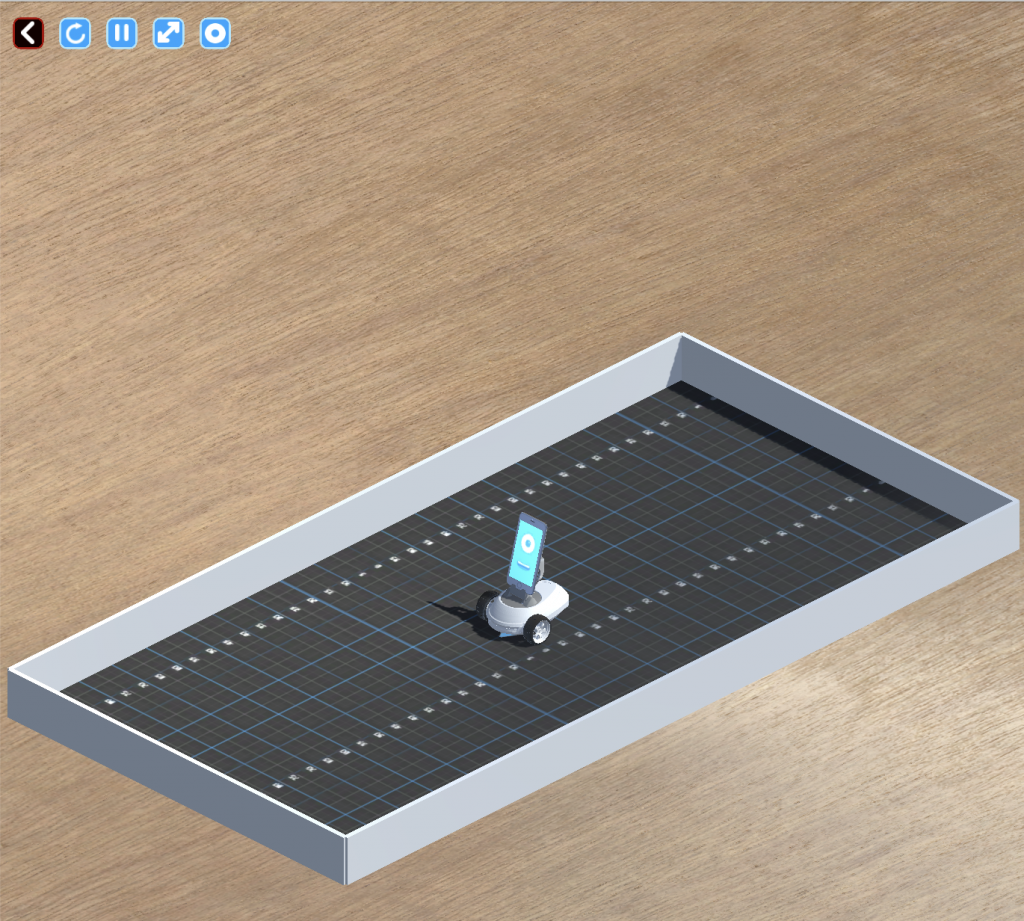
3. Al pulsar sobre la imagen en miniatura del mundo, se muestra una pantalla como la siguiente:
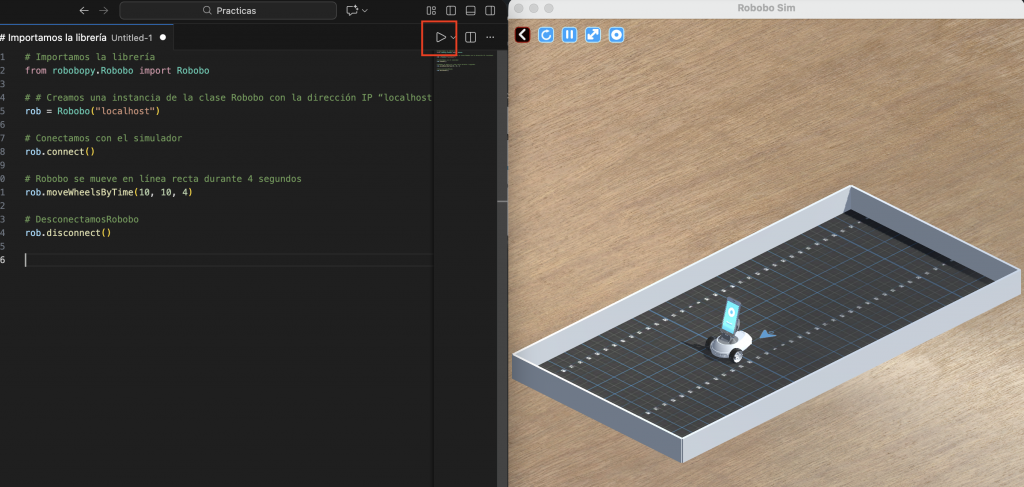
4. A continuación, creamos un archivo “prueba.py” con el siguiente contenido:
# Importamos la librería from robobopy.Robobo import Robobo
# Creamos una instancia de la clase Robobo con la dirección IP “localhost rob = Robobo("localhost") # Conectamos con el simulador rob.connect() # Robobo se mueve en línea recta durante 4 segundos rob.moveWheelsByTime(10, 10, 4) # Desconectamos Robobo rob.disconnect()
5. El último paso es ejecutar el ejemplo (por ejemplo, pulsando en el botón PLAY de Visual Studio Code). El robot debería moverse en línea recta durante 4 segundos.
Ventana de monitorización
Mientras se están creando programas con Robobo, puede ser necesario conocer el valor de los sensores de cara a establecer umbrales o valores de referencia. Por este motivo, Robobo incluye una ventana de monitorización web, que es altamente recomendable tener abierta. Para acceder a esta ventana, basta con ir a esta url: https://monitor.theroboboproject.com/
En la página que se abre, debemos escribir, en la parte superior izquierda, la dirección IP del robot real o bien localhost si estamos usando RoboboSim, y pulsar el botón Connect.

La ventana de monitorización mostrará los valores de los diferentes sensors en tiempo real según van cambiando.