Programación

![]()
Con Python puedes programar el robot para realizar tareas más avanzadas como seguir rutas, evitar obstáculos, usar sensores (de luz, temperatura, movimiento) e incluso combinarlo con inteligencia artificial o aplicaciones externas.
Está recomendado para estudiantes a partir de los 12 años o personas que ya tienen una base en programación. Aunque su sintaxis es sencilla, permite desarrollar proyectos complejos y muy creativos, lo que lo convierte en una excelente opción para usuarios intermedios y avanzados.
![]()
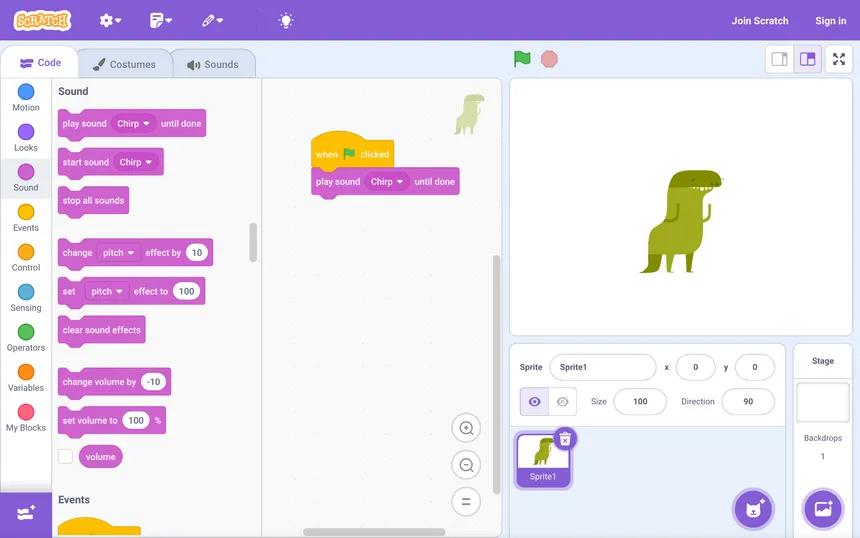
Con Scratch puedes controlar el robot de forma visual y sencilla: moverlo hacia adelante o atrás, encender luces, hacer sonidos, responder a sensores y crear pequeños juegos interactivos. Todo se hace uniendo bloques de colores, sin necesidad de escribir código.
Está pensado para niños y jóvenes a partir de los 8 años, o para cualquier persona que quiera iniciarse en la programación de manera divertida e intuitiva. Es perfecto para aprender los conceptos básicos de la lógica computacional mientras se explora la robótica.
Conexión de RoboboSim a Scratch por primera vez
Una vez que hayas descargado e iniciado el simulador:
-
-
- Inicia Chrome o Firefox y abre nuestra interfaz de Scratch 3
-
2. Conecta Scratch 3 y RoboboSim como se indica en la imagen:
IP de Robobo: Localhost
Haz clic en Connect


Conexión Inicial de RoboboSim con Python
Para usarlo con Python sólo tienes que especificar la dirección IP (localhost) en la creación de la clase. como se muestra en este ejemplo: PONER EN ESPAÑOL
# This imports the library
from robopy.Robobo import Robobo
# This creates an instance of the Robobo class with the localhost IP address
rob = Robobo("localhost")
# This connects to the robobo base
rob.connect()
# This makes Robobo move straight during 4 seconds
rob.moveWheelsByTime(10,10,4)
# This disconnects from the robobo base
rob.disconnect()